Background. Towards the end of robotic systems capable of ubiquitous, persistent deployment in the wild,
researchers across diverse subdisciplines of our field
have exploited the inherent symmetries present in robotic systems and their environment to achieve
drastic improvements in performance, efficiency, and robustness. For example:
- Equivariant architectures for data-driven perception have demonstrated impressive generalization and sample efficiency, all the while reducing model complexity and guaranteeing by design that extraneous transformations will not degrade their predictions.
- A symmetry-aware approach to the filter design has yielded improved convergence properties in state estimation, providing both formal certificates and astonishing empirical accuracy in field deployments.
- As the complexity of both individual agents and multiagent teams has grown, the exploitation of symmetry in control has tamed unwieldy high-dimensional models, sated the appetite of data-hungry methods like reinforcement learning, and aided in the decentralized coordination of large robot swarms.
- introduce new members of the broader robotics community to symmetry-informed methods,
- identify new opportunities to leverage these cross-cutting concepts and apply geometric expertise in new areas,
- align with the IROS 2024 theme "Robotics for Sustainable Development" by reducing the environmental impact of autonomous systems via reduced model complexity, more efficient algorithms, and greater reliability, and
- ultimately bring us closer to the availability of ubiquitous, intelligent robotic systems prepared to tackle society's greatest challenges and play an active role in our daily lives.
Workshop Recordings
The YouTube playlist below includes recordings of all the keynote talks and the panel discussion.
Keynote Speakers





Schedule
All times on the schedule are Abu Dhabi local time (UTC+4).
For virtual attendance, please join us on Zoom.
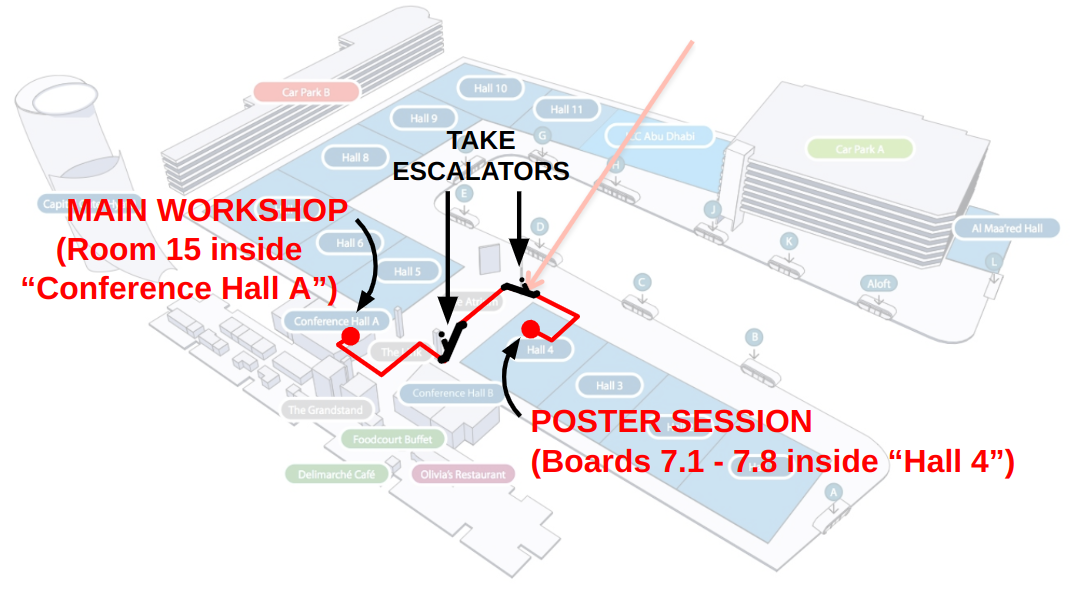
The main workshop is located in Room 15, inside "Conference Hall A". The poster session is located inside "Hall 4" (the main workshop room). The map shows the most direct route in between (go upstairs, because exhibition hall is closed off).
Click the title of each talk below to access the recording!
|
||||||
|
||||||
|
||||||
|
||||||
|
||||||
|
||||||
|
||||||
|
||||||
|
||||||
Call for Papers
We invite contributions exploring the role of symmetry across diverse problems in robotics and autonomy, including (but not limited to):
- Geometric mechanics and symmetry in locomotion planning and control
- Conservation laws and motion planning for nonholonomic vehicles
- Formal certificates or experimental verification of equivariant filters
- Approximately equivariant architectures for working with broken symmetry
- Feedback linearization and differential flatness in the presence of symmetry
- Model order reduction via symmetry
- Equivariant neural representations
- Symmetry as a prior in physics-informed machine learning
- Discrete symmetries in biological and robotic systems
- Equivariant deep learning
- Symmetries in geometric perception (3D reconstruction, registration, 3D object detection)
- Symmetries with proprioceptive sensors (IMU integration etc.)
- Symmetry-informed optimizers
- Sample complexity and robustness benefits in equivariant machine learning
- Symmetries in multiagent systems (flocking, tracking, coordination)
- Graph neural networks for decentralized multiagent autonomy
Author Guidelines
- We welcome the contribution of short papers / extended abstracts of 2-4 pages in 2-column IEEE conference format (including all figures and appendices but excluding references), to give a chance to authors of already published or ongoing works to present their work at the workshop.
- The workshop is non-archival (i.e. contribution should not prohibit submission to other venues), and preliminary or late-breaking results are welcome. Already-published works should mention where the work has previously been published. Contributions will be reviewed (single blind) for basic quality and relevance to the workshop.
- Accepted abstracts will be available on the workshop website and presented in poster format during the workshop.
- Extended abstracts should be submitted via EasyChair: https://easychair.org/conferences/?conf=symrob2024
Important Dates
All deadlines are AoE (Anywhere on Earth).
- Paper Submission:
August 16, 2024September 16, 2024 - Acceptance Notification:
August 30, 2024September 23, 2024 - Camera-Ready Submission: October 11, 2024
- Workshop: October 14, 2024
Best Poster Award
To encourage contributions, we will present a Best Poster Award (to be judged by invited speakers and perhaps other senior researchers),
with a monetary prize funded by the IEEE RAS TC on
"Computer & Robot Vision".
Accepted Papers
Accepted extended abstracts are found below!
Authors will present their work during the poster session. A digital poster is also found below for those authors who were unable to attend in person.
- Equivariant IMU Preintegration with Biases: an Inhomogeneous Galilean Group Approach,
- Hybrid-MSCEqF: An Equivariant Visual-Inertial Navigation System,
- Differentiable E(2)-Equivariant Graph Planning for Navigation,
- Towards Multi-Sensor Equivariant Filter Design,
- Exploring Diverse Quadrupedal Gaits through Symmetry Breaking,
- Leveraging Symmetry in RL-based Legged Locomotion Control,
- Geometric Algebra Grasp Diffusion for Dexterous Manipulators,
- Contact-rich SE(3)-Equivariant Robot Manipulation Task Learning via Geometric Impedance Control,
- Leveraging Symmetry to Accelerate Learning of Trajectory Tracking Controllers for Free-Flying Robotic Systems,
Organizers





Acknowledgements
The organizers gratefully acknowledge the financial support provided for the workshop by the IEEE RAS TC on
"Computer & Robot Vision".
We also appreciate the endorsement of the workshop by the IEEE RAS TC's on
"Multi-Robot Systems",
"Robot Learning", and
"Algorithms for Planning and Control of Robot Motion".

